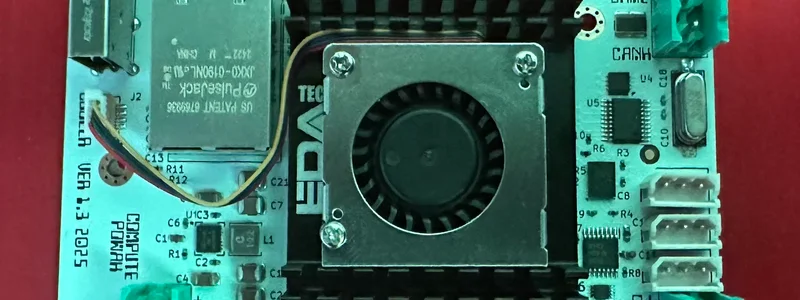
Overlord – en robotkontroller for ekte byggeprosjekter
Raspberry Pi Comupute Module 5 baser kontroller med IMU for CAN og dynamixel protokoll-kompatible servoer
Hvis du noen gang har prøvd å bygge en liten robot, starter du gjerne med en Arduino og et servoshield. Kanskje legger du til en IMU også. Det begynner uskyldig – men raskt ender du opp med et lite kråkereir av ledninger, og sjansen er stor for at roboten havner på hylla før den rekker å ta sine første skritt.
Been there. Done that.
I tillegg til den mekaniske kompleksiteten, blir også programvaren fort krevende. Skal du for eksempel bygge en selvbalanserende robot på to hjul, trenger du både en PID-kontroller og en presis IMU. Det lar seg absolutt gjøre med en Arduino eller annen mikrokontroller – men du vil raskt merke at det blir lite prosesseringskraft igjen til alt det andre.
Bygger du i stedet en edderkopplignende robot, slipper du å tenke på balanse – men må plutselig håndtere inverse kinematics. Vil du simulere bevegelsene, må du lære deg forward kinematics. Før du vet ordet av det, har du vurdert å bruke ROS, og du sitter og prøver å få liv i kode du fant på GitHub – kode som du egentlig ikke helt forstår, og som slett ikke passer roboten du selv har bygget.
Resultatet? Enda en robotstatuett på hylla.
Been there. Done that.
Billige servoer – dyre erfaringer
For de fleste hobbybyggere er budsjettet begrenset, og da frister det å kjøpe de billigste servoene man finner – som oftest modellflyservoer med PWM-styring. Men disse har som regel ingen encoderfeedback, så du vet ikke nøyaktig hvor servoarmen faktisk står, eller om den i det hele tatt nådde posisjonen du ba om. I tillegg er de gjerne upresise, både mekanisk og elektronisk.
Når du bygger roboter med mange ledd, oppdager du fort at 95 % av budsjettet forsvinner i servoer – og frustrasjonen følger tett på.
Ønskelisten
Etter å ha vært gjennom dette noen ganger, ønsket jeg meg en kontroller som kunne løse flere av disse problemene på en elegant måte. En kontroller som:
- har nok prosesseringskraft til å håndtere en kompleks robot.
- støtter flere programmeringsspråk enn C og C++ (jeg har en forkjærlighet for Go).
- støtter Dynamixel-protokollen for smarte servoer.
- støtter CAN-baserte robotservoer (som Xiaomi CyberGear og lignende).
- har innebygd IMU.
- kjører Linux – med mulighet for realtime-kjerne eller CPU-pinning for sanntidskrav.
- samler alt som ellers ville vært en stabel med shields og ledningskaos i én kompakt løsning.
- har Ethernet (lav latenstid), slik at man enkelt kan koble på f.eks. en Nvidia Jetson for maskinlæring eller bildebehandling.
- er enkel å fjernstyre, enten med en Bluetooth-gamepad eller en RC-treningsdongle.
Resultatet: Overlord
Overlord er et forsøk på å destillere alle disse erfaringene ned til én plattform – et solid, fleksibelt og moderne kontrollhjerte for alt fra små edderkopper til humanoide roboter. Målet er å gjøre det morsomt å bygge roboter igjen – uten at prosjektet ender som et kråkereir av kabler og halvferdig kode på hylla.
Den er selvfølgelig open source. Du finner KiCad-filer, PDF skjema, boot config, eksempelkode for IMU, CAN, Dynamixel og gamepad på https://github.com/hansj66/overlord.
Hackaday: A Robot Controller With The Compute Module 5.
Inspirert av dette prosjektet?
Kom til Hackheim og få tilgang til verktøy og veiledning for dine egne kreative prosjekter.